Portfolio
PESA: Purdue Emergency Services Assistant
Problem:
After talking with Smokey Anderson, the Director of Tippecanoe County Emergency Management, my team and I discovered that in mass casualty incidents (MCIs) emergency responders need to carry 100 pounds of supplies with them into emergency zones. In MCIs there are multiple patients who need care and are located in warm zones which are areas that don’t pose a serious threat to first responders but from which patients need to be evacuated. Treating patients while carrying 100 pounds of supplies easily fatigues responders and their supplies can easily run out.
Vision:
Enable first responders to provide better on-site treatment to patients by reducing their fatigue from trips to get more supplies and carrying those supplies in general.
Solution:
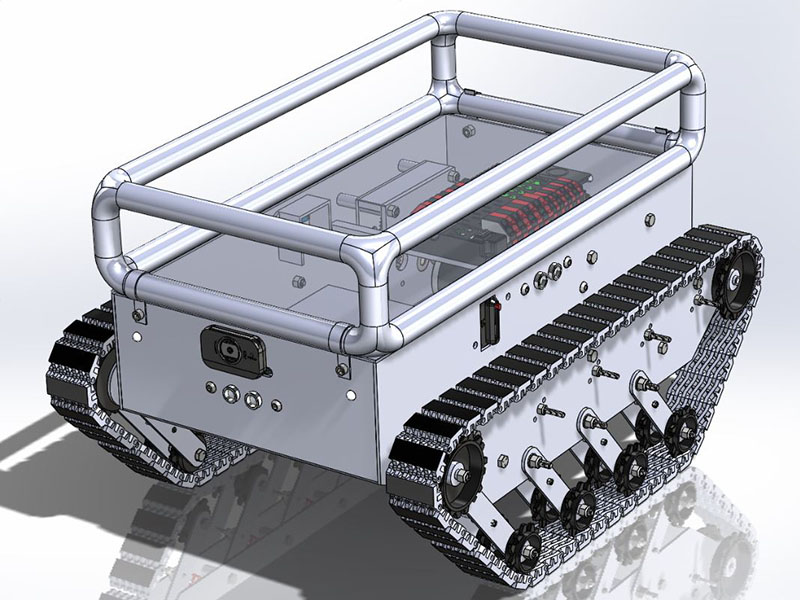
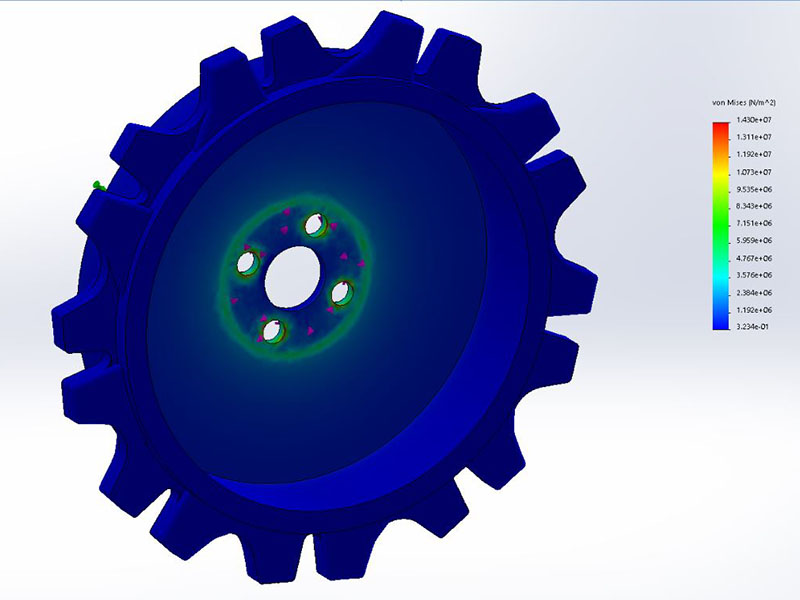
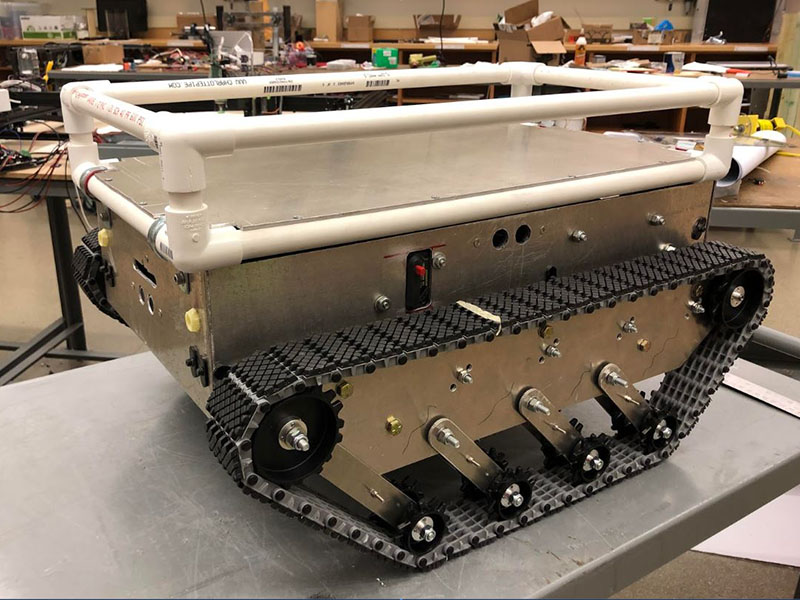
Our solution was the Purdue Emergency Services Assistant (PESA). We designed PESA to be remotely operated via laptop or tablet, utilizing a camera and ultrasonic array around the chassis for vision. PESA can traverse complex terrain and can carry 200 pounds of medical supplies in a detachable basket.
My contributions to PESA include: designing an original tank tread system, chassis design, 3D Modeling, finite element analysis using Solidworks, prototyping, and part drawings.
Download Informational Poster

Toy Design: Starship Hunter
Toy Design was a class that increased my knowledge of 3D printing, laser cutting, Catia, and rapid prototyping. I was tasked with creating a toy that had 3 unique forms of motion. I wanted all three forms of motion to come from a single input so I created a floating rotational cam system. The floating cam enabled two starships to move vertically, horizontally, and tilt from a singular crank input. The ship’s individual cams were then off-set to create the illusion of one ship chasing the other. The movement can be seen in the video to the right.
Inverted Pendulum Controller Design
Problem:
Create a controller using LabVIEW that is able to keep a pendulum on a cart inverted for approximately 20 seconds while the cart maintains a steady state within a 20 centimeter range.
Solution and Results:
A partner and I created a PID Controller with a prefilter that enabled the pendulum to remain upright indefinitely with a steady state movement of the cart being less than ±5cm. To design the controller we used system identification to model the response of the cart and pendulum and combined it with state space regulator design. Linear quadratic regulation was used to determine the optimal set of coefficients for the theoretical system, which were then tweaked through experimentation to produce the best performance for the real system.
Autonomous RC Car
Problem:
Create a controller that enables an RC car to autonomously follow a set path.
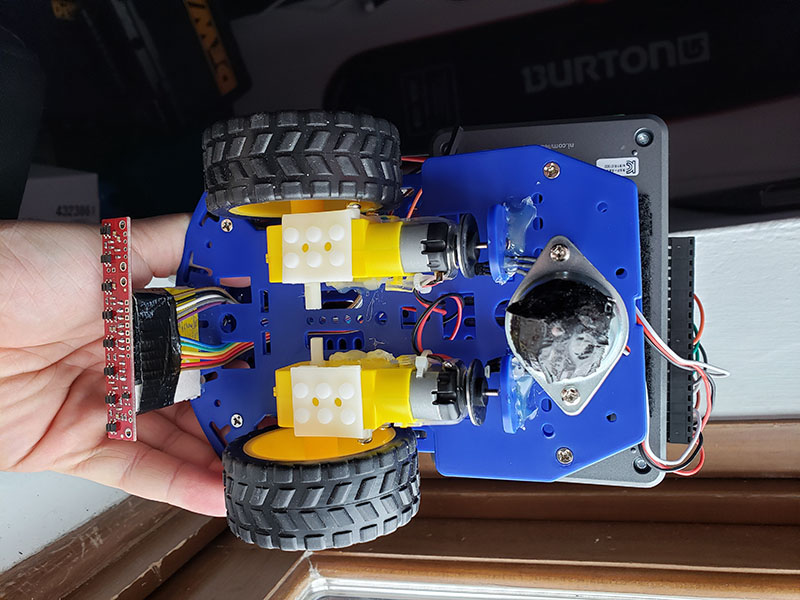
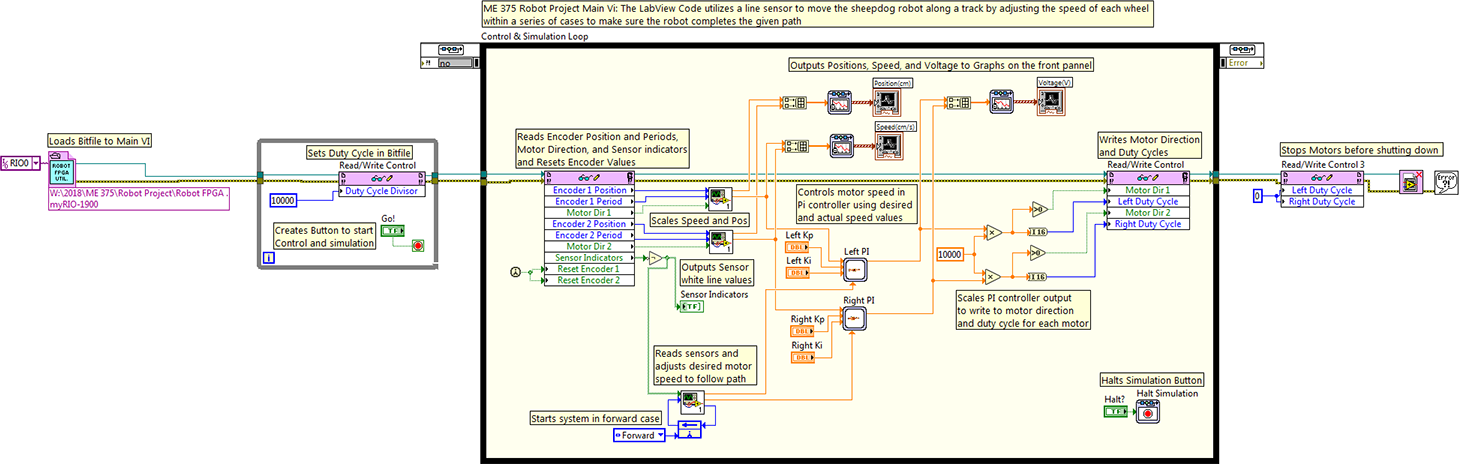
Solution:
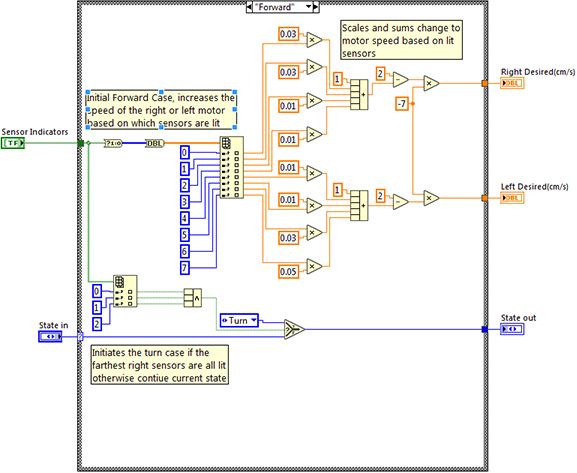
I used a closed loop LabVIEW program that utilized a myRIO FPGA interface, a line sensor, and a PI controller to guide the robot down the path. Within the PI controller were a series of case structures which altered the desired speed of each wheel on the robot based on which and how many sensor indicators were lit. The desired speed was combined with the actual speed in a PI controller to reduce the steady state error and guide the robot down the line and keep it centered. This enabled the car to be operated autonomously.